В статике и в динамике
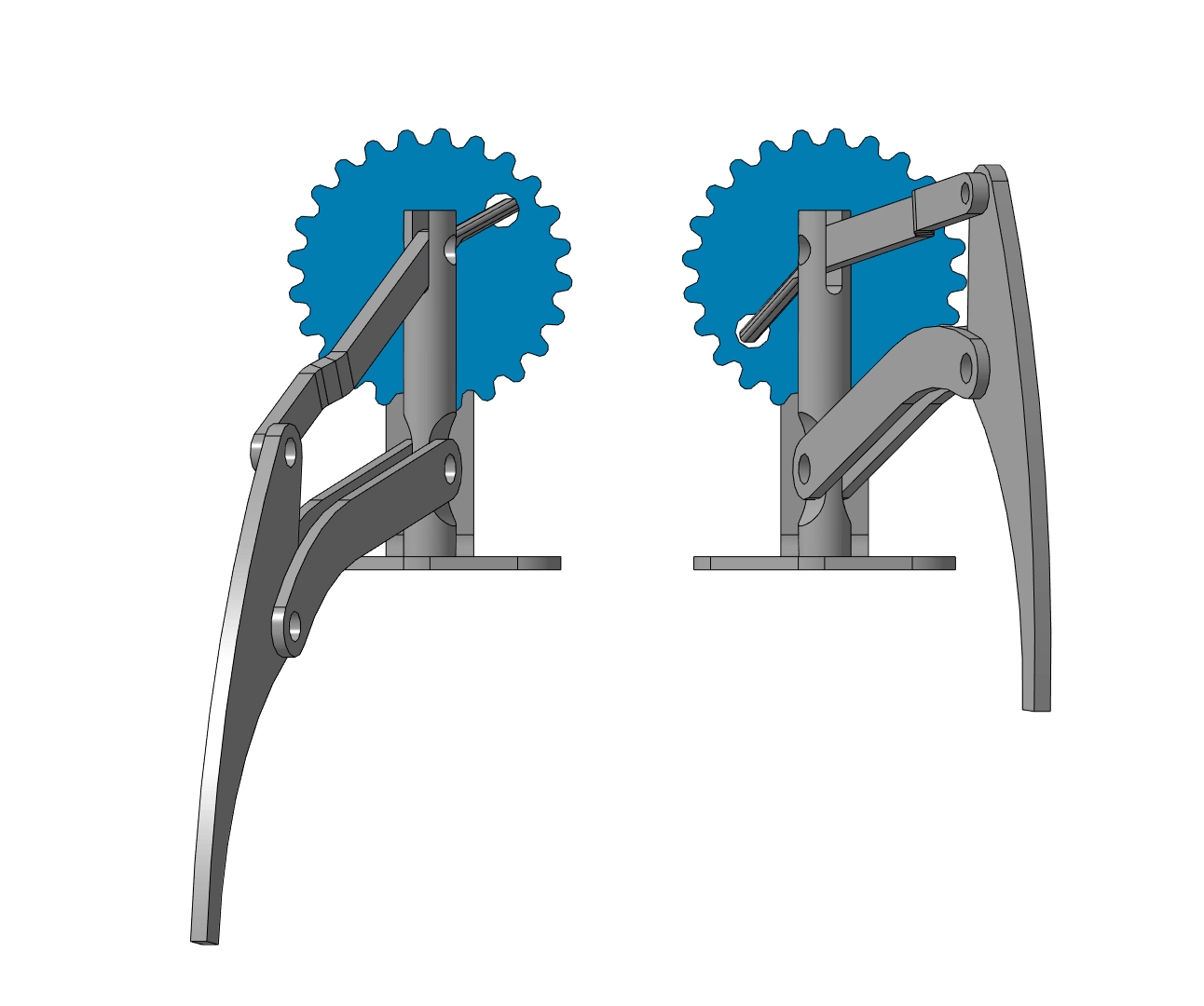
Измерения расстояний, зазоров или поиск соударений можно осуществлять как для неподвижной сборки, так и в динамичеких сценах, когда требуется интерактивное перемещение деталей или симуляция механизмов.
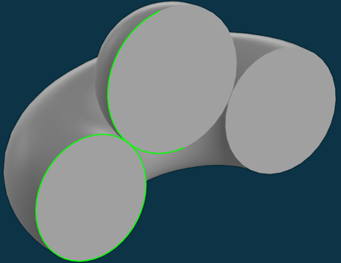
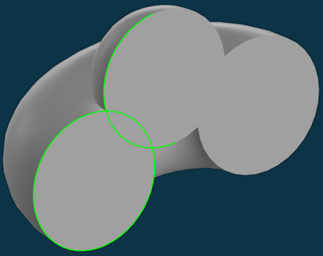
На этапе проектирования сборочного изделия необходимо убедиться в том, что между частями сборки отсутствуют пространственные наложения — коллизии.
Модуль обнаружения столкновений позволяет инженерному приложению (CAD, BIM и т.п.) выполнять проверки сборочной модели на коллизии, чтобы на раннем этапе предотвращать нарушения сборки или устранять препятствия движению частей механизма. Раннее выявление ошибок моделирования сборки важно для снижения издержек на этапе изготовления опытного образца.
Функция измерения расстояния позволяет проверять необходимые зазоры между деталями или подсборками.
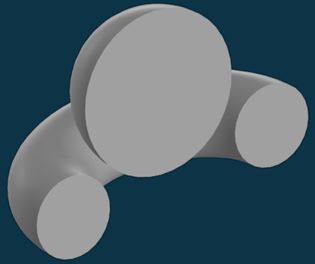
Детектор столкновений поддерживает как точную геометрию поверхностей в B-rep представлении, так и полигональные оболочки.
Детектор столкновений гарантирует точность своих результатов при работе с точной геометрией тел в B-rep (Boundary representation) представлении. Если требования по точности невысокие, то могут использоваться геометрические объекты в полигональном представлении.
Детектор столкновений предоставляет возможность приложению настраивать уровень детализации поиска.
В одних случаях требуется поиск всех элементов тела, участвующих в пересечении, в других случаях достаточно выявлять факт соударения той или иной пары тел или целых подсборок без демонстрации подробностей пересечения. Также можно исключать из поиска некоторое подмножество пар и выбирать разные стратегии поиска возможных коллизий.
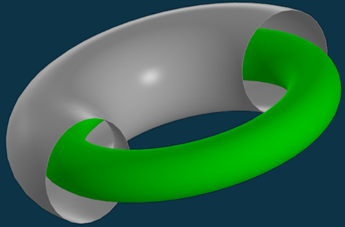
Также предоставляется возможность классифицировать пересечения, т.е различать касания и наложения.